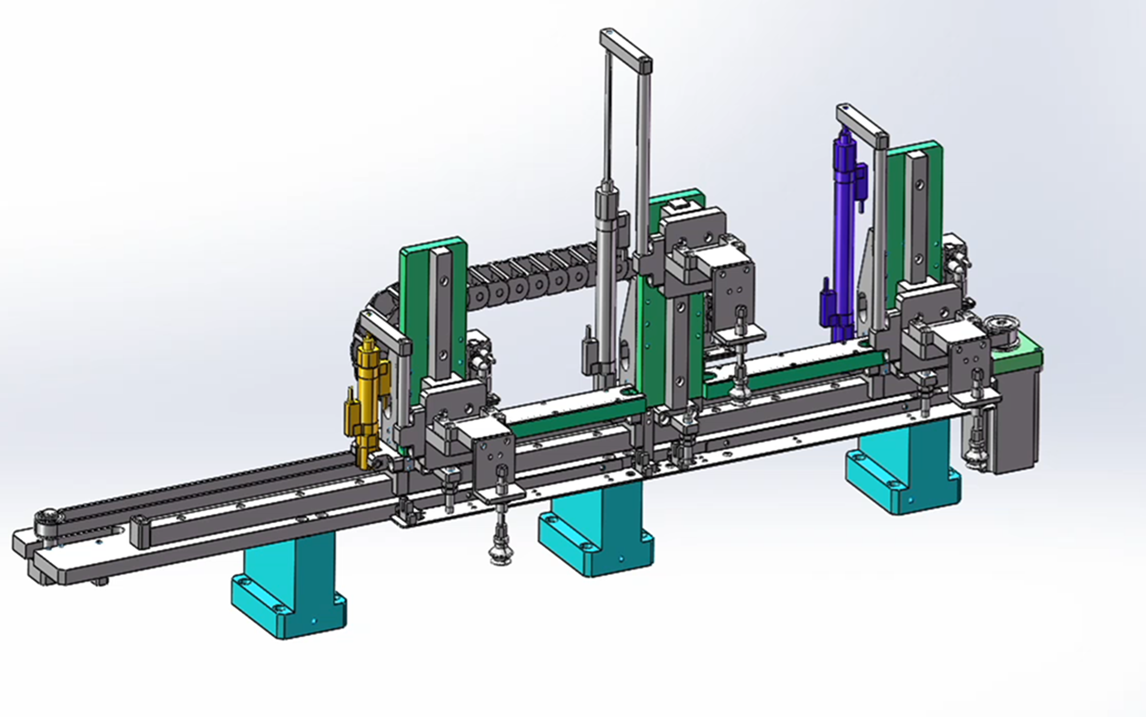
在工业自动化领域,三工位吸盘同步带移载机械手广泛应用于物料搬运、装配和分拣等环节。这种机械手通过三个工位的协调配合,实现高效、精确的移载操作。设计此类设备需要机械工程师系统性地考虑结构、驱动、控制和安全性等多个方面。以下是关键设计步骤和要点:
一、需求分析与规划
明确机械手的工作任务,包括移载物体的尺寸、重量、材质,以及三个工位的具体位置和动作要求。例如,工位一用于取料,工位二用于加工,工位三用于放置。同时,确定工作节拍和精度指标,如定位误差需控制在±0.5mm以内。基于这些需求,规划整体布局和运动轨迹,确保机械手能在三个工位间流畅移动。
二、结构设计
结构设计是机械手的基础,包括框架、吸盘组件和同步带传动系统。
- 框架:采用铝合金或钢材,确保刚性和轻量化。框架需支撑整个机械手,并便于安装于生产线。
- 吸盘组件:根据物体特性选择真空吸盘,例如硅胶吸盘适用于易损表面。吸盘布局应均匀分布,并配备真空发生器以维持稳定吸附力。
- 同步带传动系统:同步带负责驱动机械手在三个工位间水平移动。设计时需计算负载和速度,选择合适的同步带类型(如梯形齿或圆弧齿)和带轮尺寸。确保同步带张力适当,避免打滑或过载。
三、驱动与控制系统
机械手的运动由电机和控制系统实现:
- 驱动部分:通常使用伺服电机或步进电机,配合减速器以提供精确的扭矩和速度控制。电机通过同步带驱动机械手移动,同时吸盘的升降可能由气缸或电动推杆辅助。
- 控制部分:采用PLC(可编程逻辑控制器)或嵌入式系统,编写程序协调三个工位的动作。例如,实现取料、移载和放置的时序控制,并集成传感器(如光电传感器或编码器)进行位置反馈,确保同步精度。
四、同步性与精度优化
三工位移载的关键在于同步性。设计时需考虑:
- 同步带传动:通过精确的带轮设计和张力调整,减少传动误差。
- 软件算法:在控制系统中加入PID控制或其他算法,补偿机械误差,实现平滑加速和减速。
- 测试与调整:进行空载和负载测试,优化参数以确保三个工位动作协调,避免碰撞或延迟。
五、安全与维护
考虑安全性和可维护性:
- 安全措施:安装急停按钮、防护罩和传感器,防止操作人员受伤。真空系统需有安全阀,以防意外断电导致物体脱落。
- 维护设计:机械手结构应便于拆卸和更换部件,如同步带和吸盘。定期润滑和检查可延长使用寿命。
设计三工位吸盘同步带移载机械手是一个多学科工程过程,要求机械工程师综合运用机械原理、自动控制和材料知识。通过系统设计、仿真验证和现场调试,可以开发出高效可靠的设备,提升工业自动化水平。实际项目中,建议使用CAD软件进行三维建模,并通过有限元分析验证结构强度,确保设计满足工业标准。